无论是Linux还是其他操作系统,开机启动最开始的流程由BIOS完成。当电脑上电后,BIOS首先会初始化BIOS内部状态、外部接口、检测并setup硬件。这个最开始的阶段称为开机自检(POST, Power On Self Test)。随后BIOS进入启动阶段,会检查启动介质,找到bootloader,将其加载至内存并跳转至bootloader执行。SeaBIOS 为例,介绍x86架构下BIOS在启动流程所做的工作。SeaBIOS是16bit x86 BIOS的开源实现,也是qemu和kvm默认的BIOS。
实模式 x86实模式出现于Intel 8088时期,8088 CPU公有20位地址总线,8个16进制通用寄存器以及4个段寄存器(CS DS SS ES)以及3个专用寄存器(IP SP FLAGS)。要通过16位寄存器寻址20位地址空间,8088引入了分段的方法:
物理地址 = 段寄存器 << 4 + 段内偏移
如此,通过16bit的段寄存器和段内偏移便能寻址20位地址空间,计算出的地址便是实际物理地址,这也是“实”模式的由来。
First Instruction 系统上电后,BIOS最初便在16bit实模式下工作。x86-64环境下,BIOS的第一条指令位于CS(0xF000h):IP(0xFFF0h)所指向的地址。刚才提及,上电之初,BIOS在16bit实模式下工作,最大寻址1MB,按照实模式下的寻址规则:(0xF000h << 4) + (0xFFF0h) = 0xFFFF0h。那么开机启动之后,第一条指令会在0xFFFF0h执行?其实不然,开机执行的第一条指令在0xfffffff0h处执行。分段模式下的每个段寄存器寻址的实际物理地址缓存在段描述符高速缓冲寄存器中,这个寄存器对于程序员是不可见的,段描述符高速缓冲寄存器就是通过硬件加速分段模式下的寻址速度。CS段寄存器对应的段描述符高速缓冲寄存器存储的是物理地址0xFFFFFFF0h,该物理地址称为Reset vector 。
执行qemu-kvm -monitor stdio -S命令查看机器启动执行的第一条指令:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 [root@192 lab1]# qemu-kvm -monitor stdio -S QEMU 2.12.0 monitor - type 'help' for more information (qemu) VNC server running on ::1:5901 (qemu) info registers EAX=00000000 EBX=00000000 ECX=00000000 EDX=000006d3 ESI=00000000 EDI=00000000 EBP=00000000 ESP=00000000 EIP=0000fff0 EFL=00000002 [-------] CPL=0 II=0 A20=1 SMM=0 HLT=0 ES =0000 00000000 0000ffff 00009300 CS =f000 ffff0000 0000ffff 00009b00 SS =0000 00000000 0000ffff 00009300 DS =0000 00000000 0000ffff 00009300 FS =0000 00000000 0000ffff 00009300 GS =0000 00000000 0000ffff 00009300 LDT=0000 00000000 0000ffff 00008200 TR =0000 00000000 0000ffff 00008b00 GDT= 00000000 0000ffff IDT= 00000000 0000ffff CR0=60000010 CR2=00000000 CR3=00000000 CR4=00000000 ...
CS寄存器为0xf000,EIP寄存器为0000fff0,CS寄存器对应的段基址是0xffff0000,该段最能容纳0x0000ffff字节。如此,起始物理地址便是0xfffffff0,便是Reset vector。
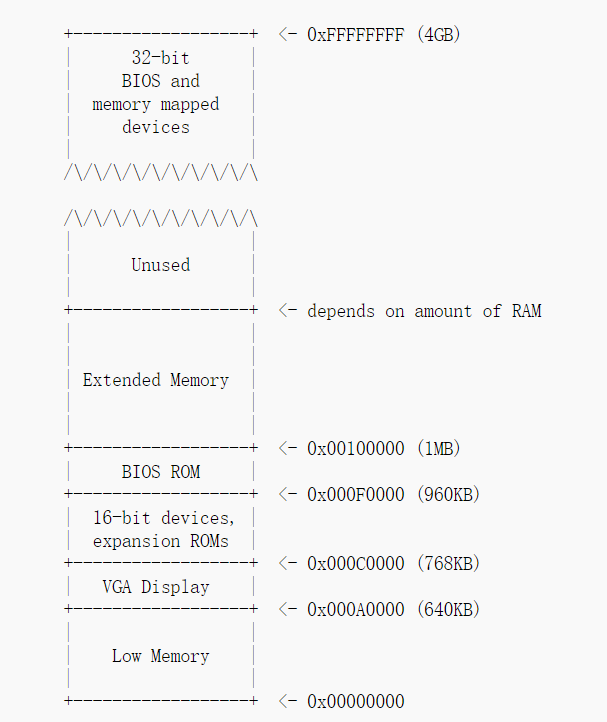
但是0xFFFFFFF0h仍然高于实模式下的最大物理地址空间1MB,为啥BIOS可以访问到了?0xFFFFFFF0h实际是BIOS ROM映射到地址空间的地址 ,而非在实模式寻址RAM的物理地址:
0xFFFE_0000 - 0xFFFF_FFFF: 128 kByte ROM mapped into address space
查看SeaBIOS源码,BIOS第一条指令会执行什么:
1 2 3 4 ORG 0xfff0 // Power-up Entry Point .global reset_vector reset_vector: ljmpw $SEG_BIOS, $entry_post
ORG是一个宏 :
1 2 3 4 // Specify a location in the fixed part of bios area. .macro ORG addr .section .fixedaddr.\addr .endm
ORG 0xfff0会定义一个名为.fixedaddr.0xfff0的ELF section,构建阶段,layoutrom.py脚本会检测名称中包含”.fixedaddr.”的section,并在最终的链接脚本中指定该section加载到的物理地址。0xf000:0xe05b
1 2 3 4 5 6 7 8 9 10 11 12 src/config.h: // Important real-mode segments #define SEG_IVT 0x0000 #define SEG_BDA 0x0040 #define SEG_BIOS 0xf000 src/romlayout.S: ORG 0xe05b entry_post: cmpl $0, %cs:HaveRunPost // Check for resume/reboot jnz entry_resume ENTRY_INTO32 _cfunc32flat_handle_post // Normal entry point
第一条指令便是跳转到1MB以下的0xfe05b处执行,如下图 所示,该地址处于BIOS ROM区域。BIOS ROM内存区域是BIOS shadow内存区域,当前该内存区域是BIOS在ROM/flash实际存储中的一份只读拷贝。由于CPU访问flash/ROM的速度/带宽要慢于CPU访问RAM的速度,BIOS shadow可以加快CPU访问BIOS程序的速度。
首先通过HaveRunPost全局变量判断是否经历过POST阶段,若经过POST阶段,则跳过POST阶段执行resume。否则切换到32bit保护模式执行handle_post函数进入POST阶段。
1 2 int HaveRunPost VARFSEG;
POST Phase 切换到32bit保护模式 我们首先看下进入32bit保护模式是如何实现的:
1 2 3 4 5 6 7 8 9 10 11 12 13 src/entryfuncs.S: .macro ENTRY_INTO32 cfunc xorw %dx, %dx movw %dx, %ss movl $ BUILD_STACK_ADDR , %esp movl $ \cfunc , %edx jmp transition32 .endm src/config.h: #define BUILD_STACK_ADDR 0x7000
首先设置堆栈段寄存器ss为0,BIOS ROM的程序堆栈处于low memory地址空间(0x7000)。这里的cfunc是函数Label,被传递到edx寄存器,transition32切换到32bit保护模式之后,会跳转到该地址执行。
transition32将CPU转换成32bit:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 src/entryfuncs.S: // Declare a function .macro DECLFUNC func .section .text.asm.\func .global \func .endm src/romlayout.S: // Place CPU into 32bit mode from 16bit mode. // %edx = return location (in 32bit mode) // Clobbers: ecx, flags, segment registers, cr0, idt/gdt DECLFUNC transition32 .global transition32_nmi_off transition32: // Disable irqs (and clear direction flag) cli cld // Disable nmi movl %eax, %ecx movl $CMOS_RESET_CODE|NMI_DISABLE_BIT, %eax outb %al, $PORT_CMOS_INDEX inb $PORT_CMOS_DATA, %al // enable a20 inb $PORT_A20, %al orb $A20_ENABLE_BIT, %al outb %al, $PORT_A20 movl %ecx, %eax transition32_nmi_off: // Set segment descriptors lidtw %cs:pmode_IDT_info lgdtw %cs:rombios32_gdt_48 // Enable protected mode movl %cr0, %ecx andl $~(CR0_PG|CR0_CD|CR0_NW), %ecx orl $CR0_PE, %ecx movl %ecx, %cr0 // start 32bit protected mode code ljmpl $SEG32_MODE32_CS, $(BUILD_BIOS_ADDR + 1f) .code32 // init data segments 1: movl $SEG32_MODE32_DS, %ecx movw %cx, %ds movw %cx, %es movw %cx, %ss movw %cx, %fs movw %cx, %gs jmpl *%edx
DECLFUNC宏定义名为.text.asm.transition32的section,transition32以及transition32_nmi_off都在该section,这两个符号通过.global对链接器可见。
首先关中断并清空方向标志位。过去,为了节省存储空间,很多功能都被合并集成在一个有“空间”的芯片上,控制NMI中断使能、CMOS控制器、RTC时钟都放在CMOS中。
1 2 3 4 5 6 7 8 src/hw/rtc.h: #define PORT_CMOS_INDEX 0x0070 #define PORT_CMOS_DATA 0x0071 #define NMI_DISABLE_BIT 0x80 ... #define CMOS_RESET_CODE 0x0f
关闭NMI中断的步骤 如下:
向0x70端口,写入NMI diable bit(0x80)以及选择CMOS寄存器,接着要通过0x71端口从同一选择CMOS寄存器读取才算完成关闭NMI操作:1 outb (0x70, (NMI_disable_bit << 7) | (selected CMOS register number));
从0x71端口读取选择CMOS寄存器完成关闭NMI中断:1 inb (0x71, (NMI_disable_bit << 7) | (selected CMOS register number));
0xFFFF:0xFFFF即0x10FFEF。访问该物理地址需要21根地址线,然而8086/8088仅有20根地址总线,因此改地址会被截断成0x0FFEF。后续80x86 CPU为了兼容这种回环现象,设计了A20总线,当A20总线为1,第21位以及更高位都有效;反之,高位为0,兼容回环现象。1 2 3 #define PORT_A20 0x0092 #define A20_ENABLE_BIT 0x02
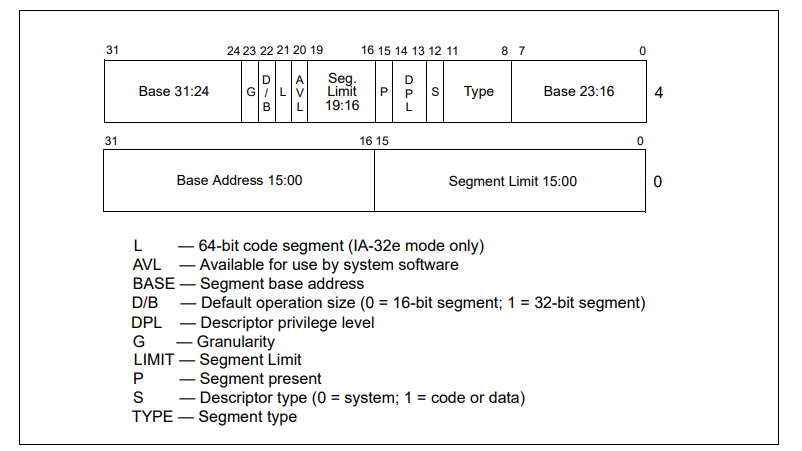
0x92I/O端口置位第2 bit位开启A20总线。lidtw和lgdtw两条命令加载idtr和gdtr寄存器,设定中断描述符表和全局描述符表。32bit保护模式下的分段寻址和实模式有较大差异。偏移值同实模式一样,只不过变成了32bit。段值仍然放在以前的16bit寄存器,不过寄存器存放的不是段基址,而是段选择符。通过段选择符不仅能够索引全局/局部描述符表获取段描述符中的基址,还能够描述当前访问操作的特权级实现段保护。
段描述符表rombios32_gdt_48如代码所示,对比段描述符结构,则一目了然。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 u8 dummy_IDT VARFSEG; struct descloc_s pmode_IDT_info VARFSEG = .length = sizeof (dummy_IDT) - 1 , .addr = (u32)&dummy_IDT, }; u64 rombios32_gdt[] VARFSEG __aligned(8 ) = { 0x0000000000000000 LL, GDT_GRANLIMIT(0xffffffff ) | GDT_CODE | GDT_B, GDT_GRANLIMIT(0xffffffff ) | GDT_DATA | GDT_B, GDT_LIMIT(BUILD_BIOS_SIZE-1 ) | GDT_CODE | GDT_BASE(BUILD_BIOS_ADDR), GDT_LIMIT(0x0ffff ) | GDT_DATA, GDT_GRANLIMIT(0xffffffff ) | GDT_CODE | GDT_BASE(BUILD_BIOS_ADDR), GDT_GRANLIMIT(0xffffffff ) | GDT_DATA, }; struct descloc_s rombios32_gdt_48 VARFSEG = .length = sizeof (rombios32_gdt) - 1 , .addr = (u32)rombios32_gdt, };
随后通过设置CR0寄存器:关闭分页模式、使能CPU cache、设置CPU cache Write-through、并开启保护模式:
1 2 3 4 5 6 src/x86.h: #define CR0_PG (1<<31) #define CR0_CD (1<<30) #define CR0_NW (1<<29) #define CR0_PE (1<<0)
最终,通过长跳转ljmpl跳转至32bit保护模式,CS寄存器存储的段选择符为01000B,即RPL = 0,执行在特权级0上;TI = 0,段选择符索引GDT;Index = 1,索引GDT中的第一个段描述符。段描述符中基址是0x0,Segment Limit是0xfffff,G(Granularity)flag置位,表示该段的范围是0x100000 * 4KB = 4GB。
1 2 3 4 src/config.h: #define SEG32_MODE32_CS (1 << 3) #define SEG32_MODE32_DS (2 << 3)
这里的1f要区分清楚。指的是前方第一个标签为“1”的位置,而不是代表十六进制数0x1F。下一个标签“1”就是这个指令的下一条。所以,看起来这个跳转是没有价值的。实际上,在cr0寄存器被设定好之前,下一条指令已经被放入流水线。而再放入的时候这条指令还是在实模式下的。所以这个ljmp指令是为了清空流水线,确保下一条指令在保护模式下执行。[1]
随后初始化所有的数据段寄存器ss、ds、es、fs、gs为$SEG32_MODE32_DS。段描述符中基址是0x0,Segment Limit是0xfffff,G(Granularity)flag置位,段的大小都是4GB。进入实模式后,所有段寻址的地址空间都是[0, 4G),当前地址空间不再是分段的,而是完整的一大块,即“平坦模型”。
随后跳转到32bit保护模式下的handle_post函数。
handle_post 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 src/post.c: void VISIBLE32FLAThandle_post (void ) { if (!CONFIG_QEMU && !CONFIG_COREBOOT) return ; serial_debug_preinit(); debug_banner(); xen_preinit(); make_bios_writable(); dopost(); }
post阶段最开始的启动串口调试等细节我们就忽略,着重关注make_bios_writable和dopost。
前面提到BIOS ROM内存区域是BIOS shadow内存区域,该内存区域是BIOS ROM/flash在内存中的只读拷贝。make_bios_writable就是用于让这段内存可写,以便后续更改一些静态分配的全局变量。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 void VISIBLE32INITdopost (void ) { code_mutable_preinit(); qemu_preinit(); coreboot_preinit(); malloc_preinit(); reloc_preinit(maininit, NULL ); }
code_mutable_preinit通过设置全局变量HaveRunPost为1,防止重复进入POST阶段。
根据SeaBIOS官方文档[2]描述,POST阶段可以分为如下四个子阶段:
preinit: 代码重定位之前的初始化操作
init: 初始化内部变量和接口
setup: setup硬件和驱动
preboot: 所有接口初始化工作完成,准备启动
SeaBIOS的代码重定位是为了释放部分占用的BIOS ROM空间,将原本很小的内存空间留给Option ROM、BIOS table以及运行时的存储空间。直接看maininit的最后代码部分startBoot准备启动:
1 2 3 4 5 6 7 8 9 10 11 12 13 void VISIBLE32FLATstartBoot (void ) { memset ((void *)BUILD_STACK_ADDR, 0 , BUILD_EBDA_MINIMUM - BUILD_STACK_ADDR); dprintf(3 , "Jump to int19\n" ); struct bregs br ; memset (&br, 0 , sizeof (br)); br.flags = F_IF; call16_int(0x19 , &br); }
bootloader工作在16bit的实模式,call16_int切换至实模式并调用int 0x19h软件中断(software-generated interrupt),进入BIOS的BOOT阶段。
The INT n instruction permits interrupts to be generated from within software by supplying an interrupt vector number as an operand.
软件(生成)中断源自CPU主动执行特定的指令(x86下的int指令)产生中断,而非源自CPU接收的外部硬件产生的中断。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 src/stacks.h: #define call16_int(nr, callregs) do { \ extern void irq_trampoline_ ##nr (void); \ __call16_int((callregs), (u32)&irq_trampoline_ ##nr ); \ } while (0) src/romlayout.S: .macro IRQ_TRAMPOLINE num DECLFUNC irq_trampoline_0x\num irq_trampoline_0x\num : int $0 x\num lretw .endm IRQ_TRAMPOLINE 02 IRQ_TRAMPOLINE 05 IRQ_TRAMPOLINE 10 IRQ_TRAMPOLINE 13 IRQ_TRAMPOLINE 15 IRQ_TRAMPOLINE 16 IRQ_TRAMPOLINE 18 IRQ_TRAMPOLINE 19 IRQ_TRAMPOLINE 1b IRQ_TRAMPOLINE 1 c IRQ_TRAMPOLINE 4 a
可见irq_trampoline_0x19实际执行:
maininit->interface_init->ivt_init初始化中断向量表:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 src/post.c: SET_IVT(0x02 , FUNC16(entry_02)); SET_IVT(0x05 , FUNC16(entry_05)); SET_IVT(0x10 , FUNC16(entry_10)); SET_IVT(0x11 , FUNC16(entry_11)); SET_IVT(0x12 , FUNC16(entry_12)); SET_IVT(0x13 , FUNC16(entry_13_official)); SET_IVT(0x14 , FUNC16(entry_14)); SET_IVT(0x15 , FUNC16(entry_15_official)); SET_IVT(0x16 , FUNC16(entry_16)); SET_IVT(0x17 , FUNC16(entry_17)); SET_IVT(0x18 , FUNC16(entry_18)); SET_IVT(0x19 , FUNC16(entry_19_official)); SET_IVT(0x1a , FUNC16(entry_1a_official)); SET_IVT(0x40 , FUNC16(entry_40)); src/romlayout.S: DECLFUNC entry_19 entry_19: ENTRY_INTO32 _cfunc32flat_handle_19 ... .global entry_19_official entry_19_official: jmp entry_19
0x19软件中断会执行handle_19,BIOS进入了BOOT阶段。
BOOT Phase 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 src/boot.c: static void do_boot (int seq_nr) { if (! CONFIG_BOOT) panic("Boot support not compiled in.\n" ); if (seq_nr >= BEVCount) boot_fail(); struct bev_s *ie = switch (ie->type) { case IPL_TYPE_FLOPPY: printf ("Booting from Floppy...\n" ); boot_disk(0x00 , CheckFloppySig); break ; case IPL_TYPE_HARDDISK: printf ("Booting from Hard Disk...\n" ); boot_disk(0x80 , 1 ); break ; case IPL_TYPE_CDROM: boot_cdrom((void *)ie->vector ); break ; case IPL_TYPE_CBFS: boot_cbfs((void *)ie->vector ); break ; case IPL_TYPE_BEV: boot_rom(ie->vector ); break ; case IPL_TYPE_HALT: boot_fail(); break ; } struct bregs br ; memset (&br, 0 , sizeof (br)); br.flags = F_IF; call16_int(0x18 , &br); } void VISIBLE32FLAThandle_19 (void ) { debug_enter(NULL , DEBUG_HDL_19); BootSequence = 0 ; do_boot(0 ); }
do_boot从第一个启动项进行启动,以常见的硬盘(IPL_TYPE_HARDDISK)为例:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 src/boot.c static void boot_disk (u8 bootdrv, int checksig) { u16 bootseg = 0x07c0 ; struct bregs br ; memset (&br, 0 , sizeof (br)); br.flags = F_IF; br.dl = bootdrv; br.es = bootseg; br.ah = 2 ; br.al = 1 ; br.cl = 1 ; call16_int(0x13 , &br); if (br.flags & F_CF) { printf ("Boot failed: could not read the boot disk\n\n" ); return ; } if (checksig) { struct mbr_s *mbr =void *)0 ; if (GET_FARVAR(bootseg, mbr->signature) != MBR_SIGNATURE) { printf ("Boot failed: not a bootable disk\n\n" ); return ; } } tpm_add_bcv(bootdrv, MAKE_FLATPTR(bootseg, 0 ), 512 ); u16 bootip = (bootseg & 0x0fff ) << 4 ; bootseg &= 0xf000 ; call_boot_entry(SEGOFF(bootseg, bootip), bootdrv); }
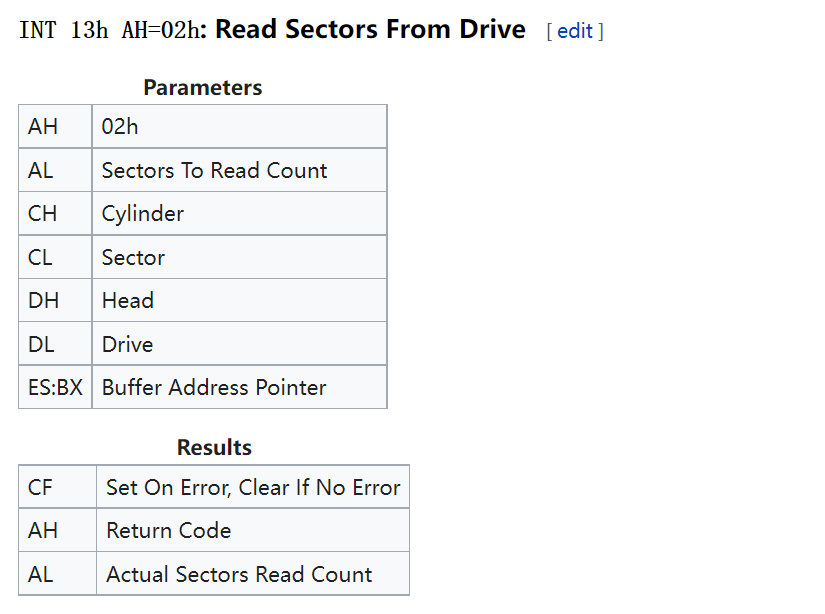
int 0x13H从硬盘读取第一个扇区(MBR)至ES:BX,BX初始化为0,因此MBR的内容读取到0x07c0:0x0。 int 0x13H相关寄存器参数[3]:GET_FARVAR(bootseg, mbr->signature)便是校验MBR签名0xaa55,确认读取到的内容就是MBR扇区。0x0:0x7c00而非0x07c0:0x0。call_boot_entry跳转至0x0:0x7c00地址,转移至bootloader执行,此时系统仍处于16bit实模式。
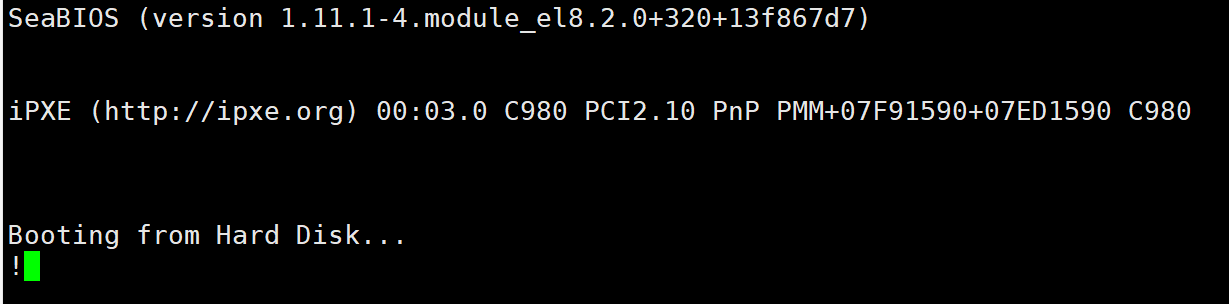
我们写一个简单的bootloader,看看BIOS启动跳转到bootloader的效果:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 boot.S: .global _start .text .code16 _start: mov $0x21, %al mov $0x0e, %ah mov $0x00, %bh mov $0x07, %bl int $0x10 jmp . .space 510-(.-_start) .word 0xaa55
构建[4]并运行:
1 2 # gcc -Wl,--oformat=binary -Wl,-Ttext=0x7c00 -Wl,--build-id=none -nostartfiles -nostdlib -m32 -o boot.bin boot.S # qemu-kvm -nographic -drive format=raw,file=boot.bin
!。
Reference [1] SeaBIOS实现简单分析 Execution_and_code_flow INT 13H Wikipedia Calculating padding length with GAS AT&T directives for a boot sector?